사회
아주대 김의겸 교수팀, 세계 최초 유연한 배선 작업 가능한 로봇손 개발
뉴스보이
2026.04.07. 13:53
뉴스보이
2026.04.07. 13:53
간단 요약
간단 요약
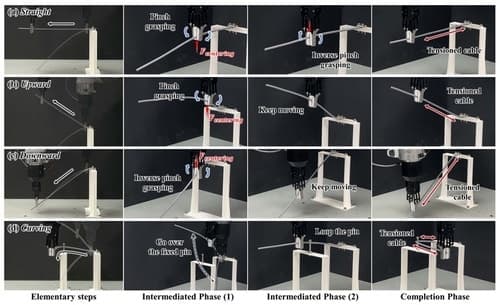
이 로봇손은 최소한의 자유도로 설계되었으며, 평행 및 핀치 파지가 가능합니다.
별도의 센서 없이 모터 전류 변화로 전선 상태를 파악하는 내재적 센싱 기술이 적용되었습니다.
이 기사는 4개 언론사의 보도를 교차 검증하여 작성되었습니다.
이 기사는 4개 언론사의 보도를 교차 검증하여 작성되었습니다.
아주대학교 김의겸 교수 연구팀이 로봇 공학의 난제로 꼽혔던 배선 작업(케이블링)을 정밀하게 수행할 수 있는 로봇손 기술을 개발했습니다. 이 기술은 유연한 전선 작업의 자동화를 가능하게 하여 가전 및 자동차 제조 공정 혁신에 기여할 것으로 기대됩니다.
연구팀은 '최소한의 자유도'로 구성된 그리핑 메커니즘을 기반으로 새로운 로봇손을 설계했습니다. 이 로봇손은 단순한 구조에도 불구하고 전선을 평평하게 잡는 평행 파지와 손가락 끝으로 꼬집듯 잡는 핀치 파지를 모두 자유자재로 구사할 수 있습니다.
특히 이 로봇은 별도의 촉각 센서 없이도 전선의 상태를 파악하는 '내재적 센싱' 기술을 적용했습니다. 로봇 손 내부 모터의 전류 변화를 분석하여 외부에서 가해지는 힘을 정확히 측정하고, 전선을 놓치지 않았는지, 얼마나 세게 잡고 있는지 등을 실시간으로 파악합니다.
이번 연구 결과는 기계공학 및 로봇 제어 분야의 권위 있는 학술지인 IEEE ASME Transactions on Mechatronics 3월호 온라인판에 게재되었습니다. 김의겸 교수는 이번 성과가 산업 현장의 섬세한 작업 자동화에 기여할 수 있기를 바란다고 밝혔습니다.
이 콘텐츠는 뉴스보이의 AI 저널리즘 엔진으로 생성 되었으며, 중립성과 사실성을 준수합니다. AI가 작성한 초안을 바탕으로 뉴스보이 에디터들이 최종검수하였습니다. (오류신고 : support@curved-road.com)
• 이 콘텐츠는 뉴스보이의 AI 저널리즘 엔진으로 생성 되었으며, 중립성과 사실성을 준수합니다.
• AI가 작성한 초안을 바탕으로 뉴스보이 에디터들이 최종검수하였습니다. (오류신고 : support@curved-road.com)